
Depois de definir estrutura, propulsão e energia, um UAV finalmente ganha a capacidade de sentir, decidir e reagir.
Essa capacidade é fornecida pelo sistema de controle de voo, o subsistema responsável por estabilizar a aeronave e transformar comandos do piloto ou comandos autônomos em movimento controlado.
Na engenharia UAV, controle de voo não é apenas software. É a integração de sensores, hardware, firmware e lógica de controle, todos operando dentro de restrições físicas e elétricas.
O papel do controle de voo em um sistema UAV
Como estabelecido em Entendendo a arquitetura UAV: subsistemas e integração, o sistema de controle de voo fica no centro da arquitetura UAV.
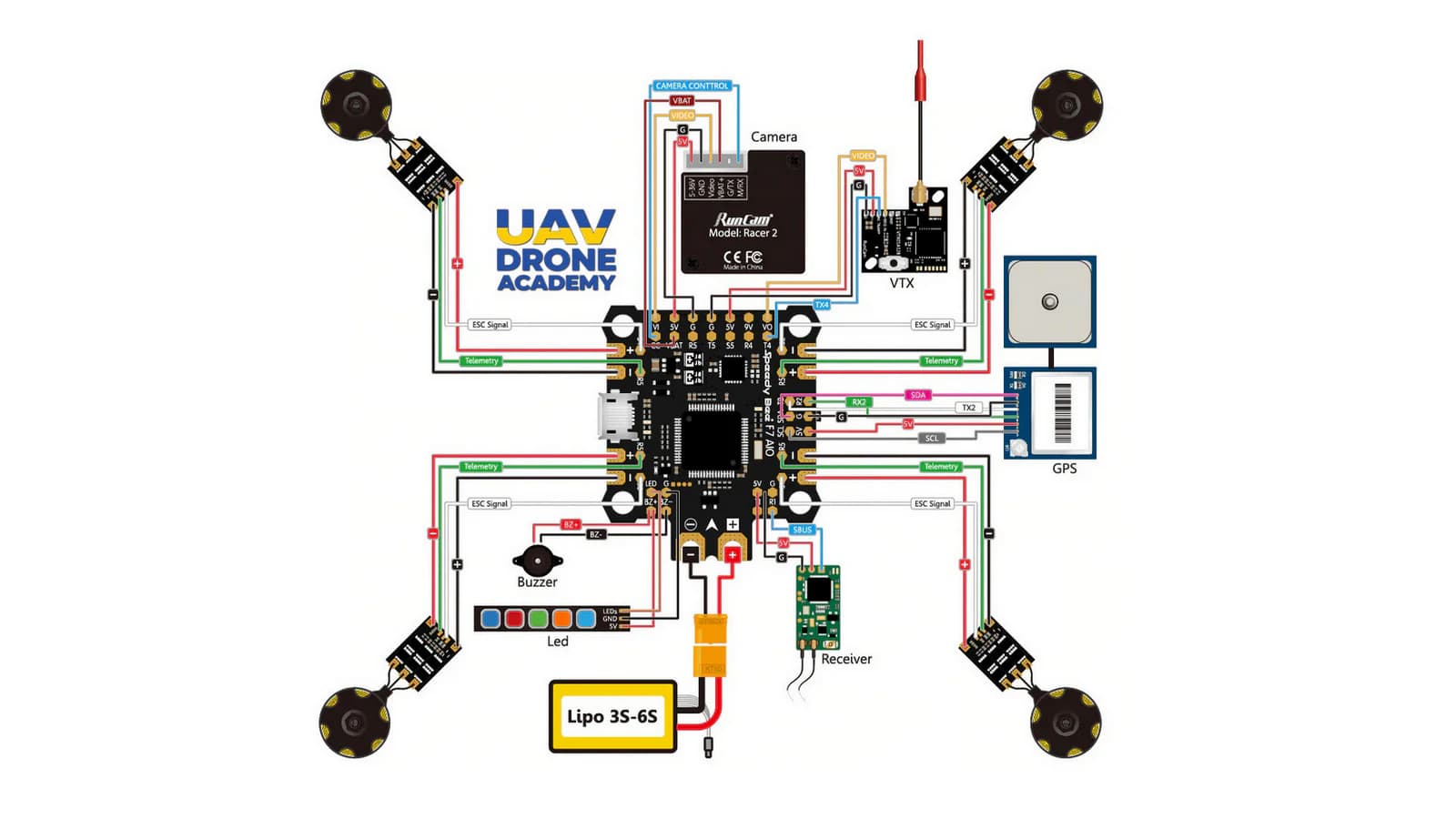
Ele faz interface direta com:
- sensores que descrevem o estado do UAV
- atuadores que geram movimento
- enlaces de comunicação que transportam comandos
- sistemas de energia que sustentam a operação
Se o controle de voo falha, o UAV falha — independentemente da qualidade dos outros subsistemas.
Sensores: como o UAV percebe o mundo
O controle de voo começa pela percepção.
Sensores comuns incluem:
- Inertial Measurement Units, ou IMUs, incluindo acelerômetros e giroscópios
- magnetômetros para referência de direção
- barômetros para estimativa de altitude
- receptores GNSS para posicionamento global
Os dados dos sensores são sempre ruidosos e imperfeitos.
A tarefa do controle de voo não é eliminar completamente o ruído, mas gerenciar a incerteza de forma confiável.
O hardware do controlador de voo
O controlador de voo é a plataforma física onde percepção, computação e controle convergem.
Ele normalmente inclui:
- um microcontrolador ou processador
- interfaces de sensores
- portas de comunicação
- regulação e filtragem de energia
A qualidade do hardware afeta:
- fidelidade dos sensores
- precisão de temporização
- resistência ao ruído elétrico
É por isso que o posicionamento do controlador de voo e a qualidade da energia — discutidos em artigos anteriores — são críticos.
Firmware e lógica de controle
O firmware define como o UAV se comporta.
Isso inclui:
- algoritmos de fusão de sensores
- malhas de controle, incluindo controle de taxa, atitude e posição
- lógica de failsafe
- interfaces com sistemas de propulsão e comunicação
Um bom firmware não compensa hardware ruim ou um projeto de energia inadequado.
Ele assume que os fundamentos estruturais, elétricos e mecânicos já estão corretos.
Malhas de controle e estabilidade
Em sua essência, o controle de voo depende de malhas de feedback.
Essas malhas continuamente:
- medem o estado do UAV
- comparam esse estado com o estado desejado
- aplicam ações corretivas
A estabilidade depende de:
- qualidade dos sensores
- consistência de temporização
- níveis de vibração mecânica
- resposta da propulsão
Por isso, o desempenho do controle de voo reflete o sistema inteiro, não apenas parâmetros de ajuste.
Equívocos comuns sobre controle de voo
Alguns mal-entendidos frequentes incluem:
- acreditar que o firmware sozinho determina a estabilidade
- tratar ajustes como tentativa e erro em vez de diagnóstico
- ignorar vibração e ruído de energia
- assumir que uma configuração serve para todas as estruturas
Controle de voo é um problema de sistema — não um problema de preset.
O que vem a seguir?
Depois que o UAV consegue perceber e controlar seu movimento, o próximo desafio é a comunicação confiável.
No artigo seguinte, vamos explorar:
Sistemas de comunicação UAV: enlaces de rádio, telemetria e transmissão de vídeo
Isso conectará a lógica de controle a comando, feedback e consciência situacional.

